Giới thiệu về mạch điều khiển tốc độ và đảo chiều động cơ BLDC sử dụng IC MC33035. Mạch đã được thử nghiệm với động cơ BLDC 24V trong máy photo copy. Động cơ quay với tốc độ cao, tốc độ điều khiển mượt, mạch chạy ổn định, Mosfet không bị quá nóng.
Mục lục
1. Giới thiệu về IC MC33035
IC MC33035 là IC chuyên biệt dùng để điều khiển động cơ BLDC với hiệu suất cao. Chứa tất cả các chức năng hoạt động cần thiết để thực hiện một hệ thống điều khiển vòng kín, vòng hở.
IC MC33035 có nhiệm vụ xuất xung điều khiển cầu Mosfet 3 pha mà không cần lập trình. Thực hiện các chức năng điều khiển cơ bản như điều khiển tốc độ vòng hở, đảo chiều, thắng động cơ…
Động cơ BLDC có thể sử dụng với loại cảm biến Hall 60 hoặc 120 độ và cũng có thể điều khiển cả động cơ một chiều.

Giá bán các IC MC33035 ở Shopee
– Thông số kỹ thuật
+ Điện áp hoạt động 10 – 30V
+ Dòng điện ngõ ra tối đa 100mA
+ Thích hợp với động cơ BLDC có cảm biến Hall 60 hoặc 120 độ và cả động cơ DC
+ Chức năng bảo vệ: khóa điện áp thấp, bảo vệ quá nhiệt cho IC
+ Ưu điểm của mạch điều khiển tốc độ và đảo chiều động cơ BLDC là không bị giới hạn về công suất. Do mạch công suất rời nên điện áp và dòng điện phụ thuộc vào động cơ và các khóa bán dẫn IGBT hay Mosfet.
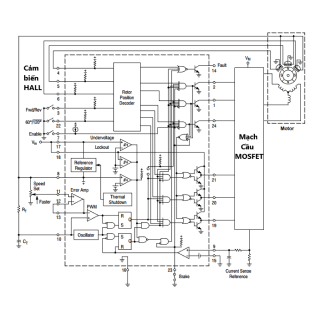
– Giải thích chức năng các chân

Mạch điều khiển tốc độ và đảo chiều động cơ BLDC tổng quát
+ Chân 1, 2, 24 (BT, AT, CT): ngõ ra điều khiển các Mosfet bên trên của cầu 3 pha
+ Chân 19, 20, 12 (CB, BB, AB): ngõ ra điều khiển các Mosfet phía dưới của cầu 3 pha
+ Chân 3 (Fwd/Rev): điều khiển đảo chiều quay động cơ BLDC
+ Chân 4, 5, 6 (SA, SB, SC): kết nối với tín hiệu ngõ ra của cảm biến HALL
+ Chân 7 (Enable): Ở mức cao thì cho phép động cơ chạy, ngược lại nếu ở mức thấp thì cấm xuất xung ngõ ra.
+ Chân 8 (Reference): Chân điện áp tham chiếu 6,25V cho mạch tạo dao động RC
+ Chân 9 (Current Sense Noninverting input): chân này kết nối với điện trở Rs để tạo ra điện áp so sánh với điện áp tham chiếu nội 100mV. Nếu dòng điện quá lớn thì điện áp ngõ ra lớn hơn 100mV, IC ngắt ngõ ra. Lưu lý: Nếu không sử dụng chức năng bảo vệ quá dòng thì phải kết nối chân 9 với GND.
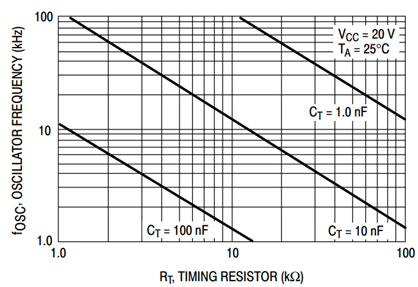
+ Chân 10 (Oscillator) chân lựa chọn tần số sóng mang bằng giá trị điện trở RT và tụ CT (22- 28Khz)
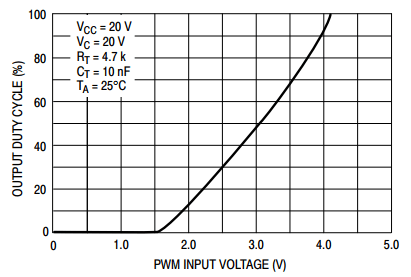
+ Chân 11 (Error Amp Noninverting Input): kết nối với biến trở để điều khiển tốc độ. Thay đổi điện áp tại chân này làm thay đổi xung PWM, điện áp thay đổi từ 1,5 – 4,1V sẽ thay đổi PWM từ 0 – 100%.
+ Chân 12 (Error Amp Inverting Input): Kết nối với chân 13 trong các ứng dụng vòng hở
+ Chân 14 (Fault Output): Báo trạng thái lỗi và chân này được kéo xuống mức thấp. Các trường hợp lỗi: Sai mã đầu vào của cảm biến Hall, Chân Enable ở mức thấp, điện áp tại chân 9 lớn hơn 100mV, điện áp thấp, quá nhiệt.
+ Chân 15 (Current Sense Inverting Input) chân tham chiếu cho điện áp 100mV bên trong. Thường được kết nối với GND.
+ Chân 16, 17 (GND, VCC) 2 chân cấp nguồn cho IC điện áp từ 10 – 30V
+ Chân 18 (VC) điện áp cấp cho chân này sẽ là giá trị mức cao của ngõ ra tín hiệu điều khiển các Mosfet phía dưới (10-30V)
+ Chân 22 (60/120 Select): lựa chọn loại tín hiệu cảm biến Hall 60 hoặc 120 độ
+ Chân 23 (Break): Khi ở mức thấp thì cho phép động cơ chạy. Ở mức cao thì động cơ sẽ giảm tốc nhanh chóng.
2. Mạch điều khiển tốc độ và đảo chiều động cơ BLDC dùng MC33035
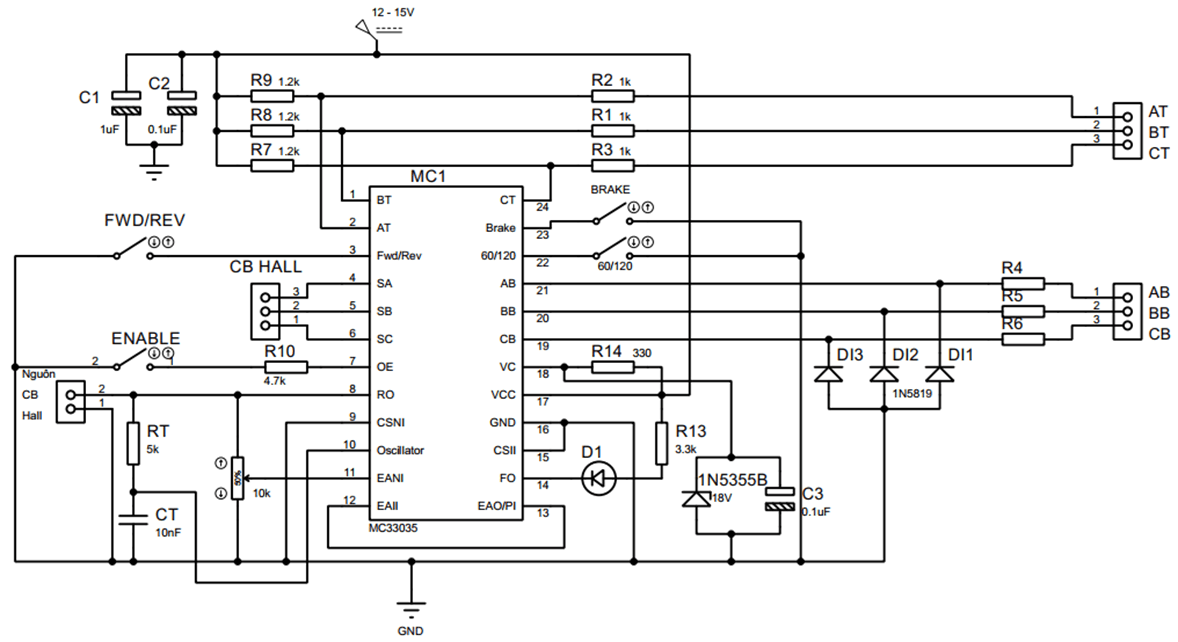
2.1 Mạch điều khiển tốc độ và đảo chiều động cơ BLDC
+ Mạch điều khiển sử dụng công tắc đảo chiều tại chân số 3. Biến trở điều chỉnh tốc độ tại chân 11
+ Công tắc Enable cho phép hoặc cấm ngõ ra kết nối với chân số 7. Công tắc thắng nhanh động cơ nối với chân 23, lưu ý khi chạy cần đóng công tắc này để cho phép động cơ chạy.
+ Chân số 10 kết nối với điểm giữa của điện trở RT và tụ CT, mạch dưới đây chọn điện trở 5k và tụ 10nF.
+ Chân 7 kết nối với bóng đèn và điện trở lên VCC, khi lỗi thì tín hiệu chân 7 xuống mức thấp, đèn sáng.
Sơ đồ mạch điều khiển tốc độ và đảo chiều động cơ BLDC
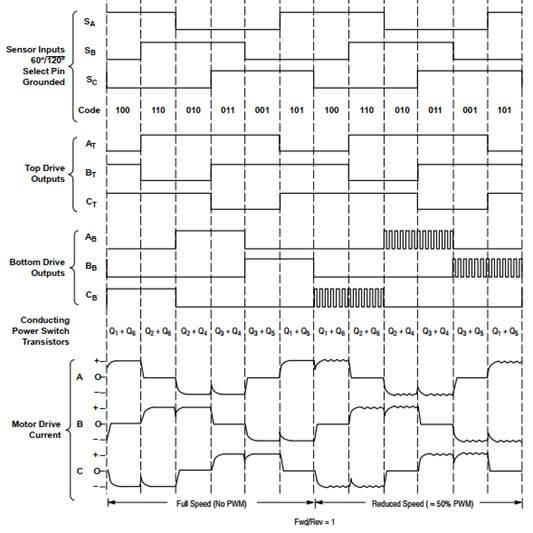
Dạng sóng ngõ ra của IC như hình bên dưới. Ta thấy:
+ Khi tín hiệu xung AT ở mức thấp thì tín hiệu AB cũng ở mức thấp
+ Khi tín hiệu xung AB ở mức cao thì tín hiệu AT ở mức cao.
=> Từ đó ta sẽ kết nối chân AT kích Mosfet kênh P ở trên và AB kích Mosfet kênh N bên dưới. Điều này sẽ tránh gây ngắn mạch do hai Mosfet trên và dưới cùng dẫn.
+ Xung PWM chỉ được áp dụng đối với tín hiệu xung bên dưới AB, BB, CB.
+ IC MC33035 dựa theo tín hiệu trả về từ cảm biến Hall để xuất xung điều khiển.
+ Dạng sóng ngõ ra của động cơ ở dạng Six Step (6 bước)
Dạng ngõ ra từ IC MC33035 và dạng sóng động cơ
2.2 Mạch công suất sử dụng cầu Mosfet
Mạch công suất sử dụng cầu 3 pha mosfet, 3 mosfet phía trên là kênh P và 3 mosfet phía dưới là kênh N.
Cần kết nối các xung kích theo đúng thứ tự pha để mạch hoạt động đúng và tránh gây ngắn mạch:
+ Ngõ ra AT, BT, CT kết nối với cực G của các Mosfet Q1, Q2, Q3
+ Ngõ ra AB, BB, CB kết nối với cực G của các Mosfet Q4, Q5, Q6
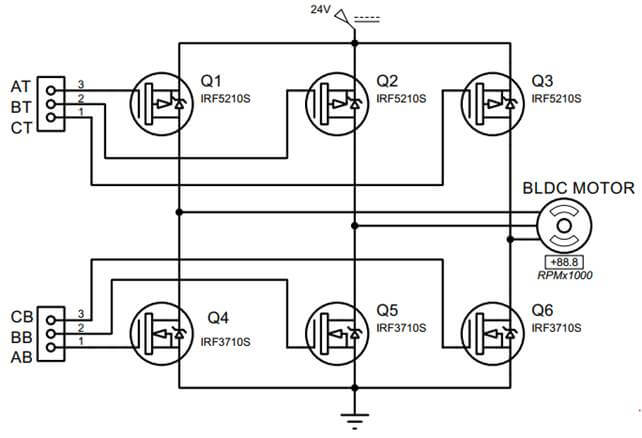
Mạch công suất điều khiển tốc độ và đảo chiều động cơ BLDC
Nguyên lý hoạt động của mạch là khi có tín hiệu xung kích mức thấp đưa vào Mosfet kênh P ở phía trên thì Mosfet được kích dẫn. Trong khi đó tín hiệu mức cao sẽ kích dẫn Mosfet bên dưới.
Hai Mosfet ở cùng một cột không được dẫn cùng lúc để không dẫn đến ngắn mạch. Tại mỗi thời điểm sẽ có một cặp Mosfet dẫn ví dụ Q1 + Q5, Q1 + Q6.
>>> Xem thêm:
3 mạch điều khiển tốc độ và đảo chiều động cơ bước